







S. Kopylov, G. Phanomchoeng, M. Ambrož, Ž. Petan, R. Kunc, Y. Qiu
Journal of Vibration and Control, julij 2022
Abstract:
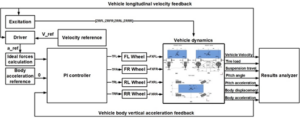 Relocating the electric motor to a position inside the wheel offers a variety of benefits, such as reduced overall vehicle weight, more efficient production of vehicles, more flexible design and better road handling because of the accurate torque control on each wheel. However, the motor also increases the unsprung mass, which can impair the ride comfort of the vehicle. In this paper we propose and investigate a control strategy using the vertical component of the driving force provided by an in-wheel motor for better ride comfort and handling dynamics. In the next stage, a mathematical model of the vehicle with coupled longitudinal, lateral and vertical dynamics was introduced. The parameters of the vehicle were measured and collected from an actual car equipped with in-wheel motors. To analyze the performance of the controller, a model of the vehicle was tested in a series of simulations. The straight-line acceleration test indicated an improvement to the ride comfort of 31.8% in terms of the RMS vertical vibrations of the sprung mass. The control is achieved without any deterioration of the tire load and the vehicle’s longitudinal dynamics. The stable lateral dynamics of the controlled vehicle was confirmed using a sine-sweep steering excitation, conducted on a perfectly smooth road surface with a constant longitudinal acceleration.
Relocating the electric motor to a position inside the wheel offers a variety of benefits, such as reduced overall vehicle weight, more efficient production of vehicles, more flexible design and better road handling because of the accurate torque control on each wheel. However, the motor also increases the unsprung mass, which can impair the ride comfort of the vehicle. In this paper we propose and investigate a control strategy using the vertical component of the driving force provided by an in-wheel motor for better ride comfort and handling dynamics. In the next stage, a mathematical model of the vehicle with coupled longitudinal, lateral and vertical dynamics was introduced. The parameters of the vehicle were measured and collected from an actual car equipped with in-wheel motors. To analyze the performance of the controller, a model of the vehicle was tested in a series of simulations. The straight-line acceleration test indicated an improvement to the ride comfort of 31.8% in terms of the RMS vertical vibrations of the sprung mass. The control is achieved without any deterioration of the tire load and the vehicle’s longitudinal dynamics. The stable lateral dynamics of the controlled vehicle was confirmed using a sine-sweep steering excitation, conducted on a perfectly smooth road surface with a constant longitudinal acceleration.